|
Vor einigen Wochen fragte mich ein Freund, der Kurator am Computer History Museum in Moffet Field ist, ob ich nicht einen kleinen analogen Simulator bauen könnte, der für eine Ausstellung zum Thema Analogrechnen genutzt werden könnte. Kurze Zeit später fragte mich ein anderer Bekannter vom Computer Museum in Kiel fast genau dasselbe, was dazu führte, dass ich mir endlich ein wenig Zeit nahm, um mir etwas auszudenken. Die folgende Schaltung ist das Ergebnis eines auf's aller Angenehmste verbastelten Wochenendes. Eine Simulationsschaltung, die in einer interaktiven Ausstellung eines Museums zum Einsatz gelangen soll, muss zum einen als Blickfang dienen, darf aber andererseits nicht zu kompliziert sein, um den Bediener nicht zu frustrieren. Änderungen der Parametrisierung müssen direkt Wirkung zeigen und Fehlbedienung darf nicht zu einem Schadem am Simulator führen. Unter Berücksichtigung dieser Anforderungen kommen eigentlich nur sehr einfache Simulationen wie die eines Masse-Feder-Dämpfer-Systems oder eines springenden Balles in Frage, die nur wenige Parameter aufweisen, unter denen sich aber auch jeder etwas vorstellen kann. Ich entschied mich für einen springenden Ball. Als Ausgabegeräte kommen im vorliegenden Fall ein Oszilloskop sowie ein Lautsprecher zum Einsatz, der das Aufprallgeräsch des springenden Balles generiert. Insgesamt stehen drei Parameter zur Verfügung, die wahlfrei eingestellt werden können: Die Erdbeschleunigung, die Dämpfung durch Luftreibung sowie die Elastizität des Balles. |
|
|
Das Bild zur Linken zeigt die Grundbewegung eines springenden Balles, der von oben links geworfen wird. Die Sprunghöhe nimmer, bedingt durch Luftreibung, kontinuierlich ab - darüberhinaus wird angenommen, dass die Interaktion zwischen Ball und Boden rein elastisch, d.h. ohne jede plastische Komponente ist, so dass hier keinerlei Energie umgewandelt wird. |
|
Um die y-Position des Balles zu bestimmen, ist es ausreichend, über seine Geschwindigkeit nach der Zeit zu integrieren, wie in der Gleichung rechts dargestellt. Der Punkt über der Variablen y kennzeichnet die erste Ableitung nach der Zeit, wobei y0 die Anfangsposition des Balles darstellt. |
|
|
Woher kommt nun die Ballgeschwindigkeit? Offensichtlich aus einer zweiten Integration - diesmal über die Ballbeschleunigung, wie links dargestellt ist. Die zwei Punkte über y kennzeichnen entsprechend die zweite Ableitung, y-Punkt-0 ist die Anfangsbeschleunigung des Balles, der beispielsweise aktiv geworfen sein könnte. |
|
Nun bleibt noch zu klären, woher man die Ballbeschleunigung bekommt. Dies ist in der Gleichung rechts dargestellt, die aus zwei Teilen besteht: Der obere Teil gilt, wenn sich der Ball quasi unterhalb des Bodens befindet und zurückprallt, der untere Teil beschreibt denselben Effekt für den Fall, dass der Ball an die Decke des gedachten Kastens stößt. Um Simulation und Schaltung einfach zu halten, wird auf eine obere Begrenzung verzichtet, so dass sich der untere Teil der Gleichung entsprechend vereinfacht, da der Term nach der geschweiften Klammer entfällt. Hierbei ist -g die Erdbeschleunigung, +d mal y-Punkt ist die durch Luftreibung verursachte Däpfung, die vereinfachend als proportional zur Geschwindigkeit angenommen wird, und c ist der Elastizitätskoeefizient des Balles. |
|
|
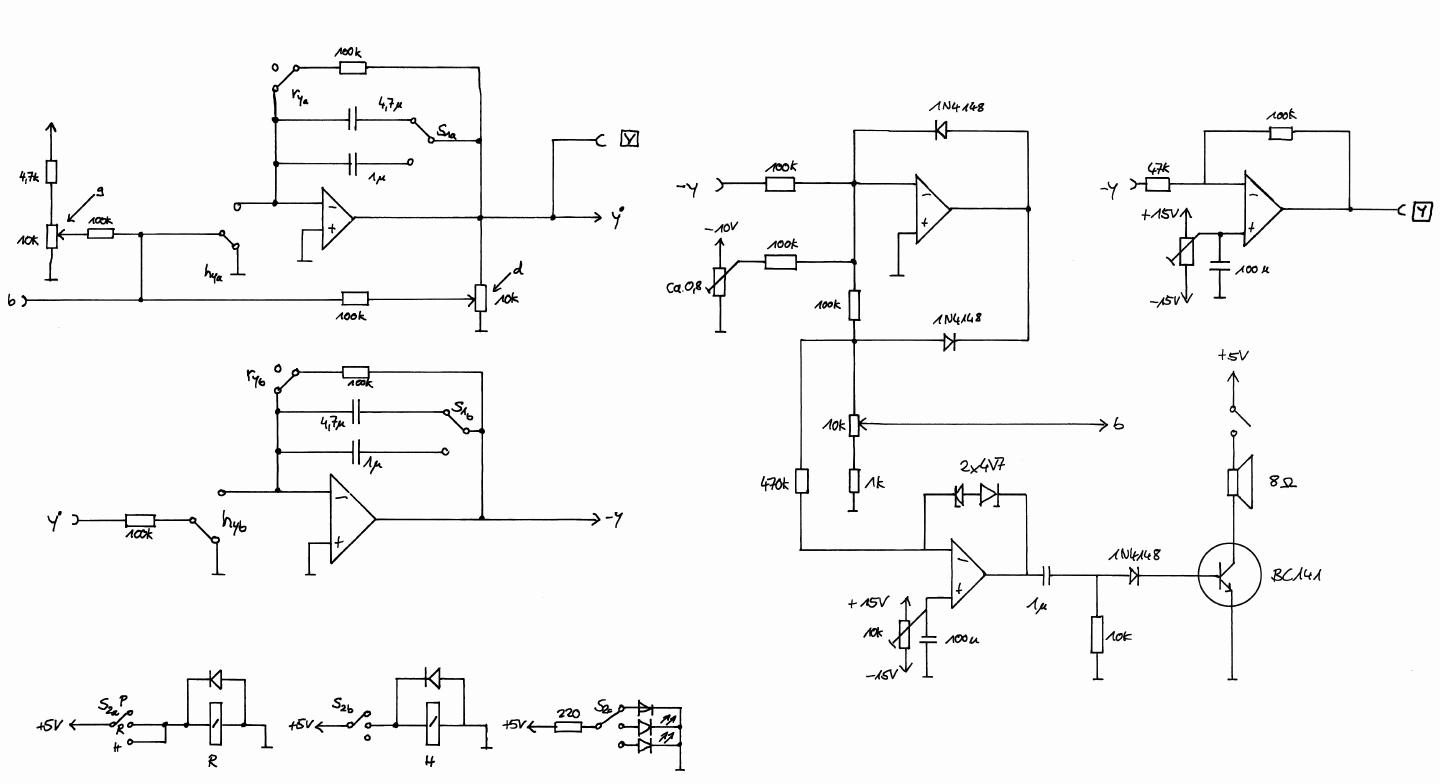
Um diese Differentialgleichung zweiten Grades zu lösen, werden zwei elektronische Integrierer sowie ein Summierer benötigt. Da jede aktive Komponente eines Analogrechners einen Vorzeichenwechsel verursacht, erhät man somit entweder die Geschwindigkeit oder die Beschleunigung des Balles mit umgekehrtem Vorzeichen. Aus diesem Grunde wird ein weiterer Summierer zur Vorzeichenkorrektur benötigt, wenn sowohl Geschwindigkeit als auch Position von Interesse bei der Simulation sind. Ein weiterer Operationsverstärker wird zur Ansteuerung des Lautsprechers benötigt, um das typische Zurückprallgeräusch des Balles zu generieren. Alles in allem benötigt der vorgestellte Simulator fünf Operationsverstärker, einen NPN-Transistor sowie zwei Relais für die Steuerung der drei Betriebsmodi. Der unten gezeigte Aufbau verwendet ein unnötig kompliziertes Netzteil und weicht in wenigen Details vom folgenden Schaltplan ab. Die eigentliche Schaltung benötigt als Versorgungsspannungen + 5 V für die Relais sowie +/- 15 V für die eigentliche Rechenschaltung. Die Schaltung selbst ist ausgesprochen einfach - beide Integrierer verwenden Relaisumschalter für die Betriebsartensteuerung (Anfangswert, Rechnen, Halt). Hierbei ist der erste Modus ausgesprochen einfach, da als Anfangswerte an allen Stellen Null vorgesehen wurde, so dass die Kondensatoren nur entladen werden müssen. Durch Klicken auf das untenstehende Schaltbild kann ein hochauflösendes Bild hiervon geladen werden. Alternativ steht hier eine PDF-Variante des Schaltplanes zur Verfügung. Schalter 1 wird benutzt, um zwischen schnellem und langsamem Simulationslauf zu wählen, während Schalter 2 für die Betriebsartenwahl zuständig ist.
|
|
|
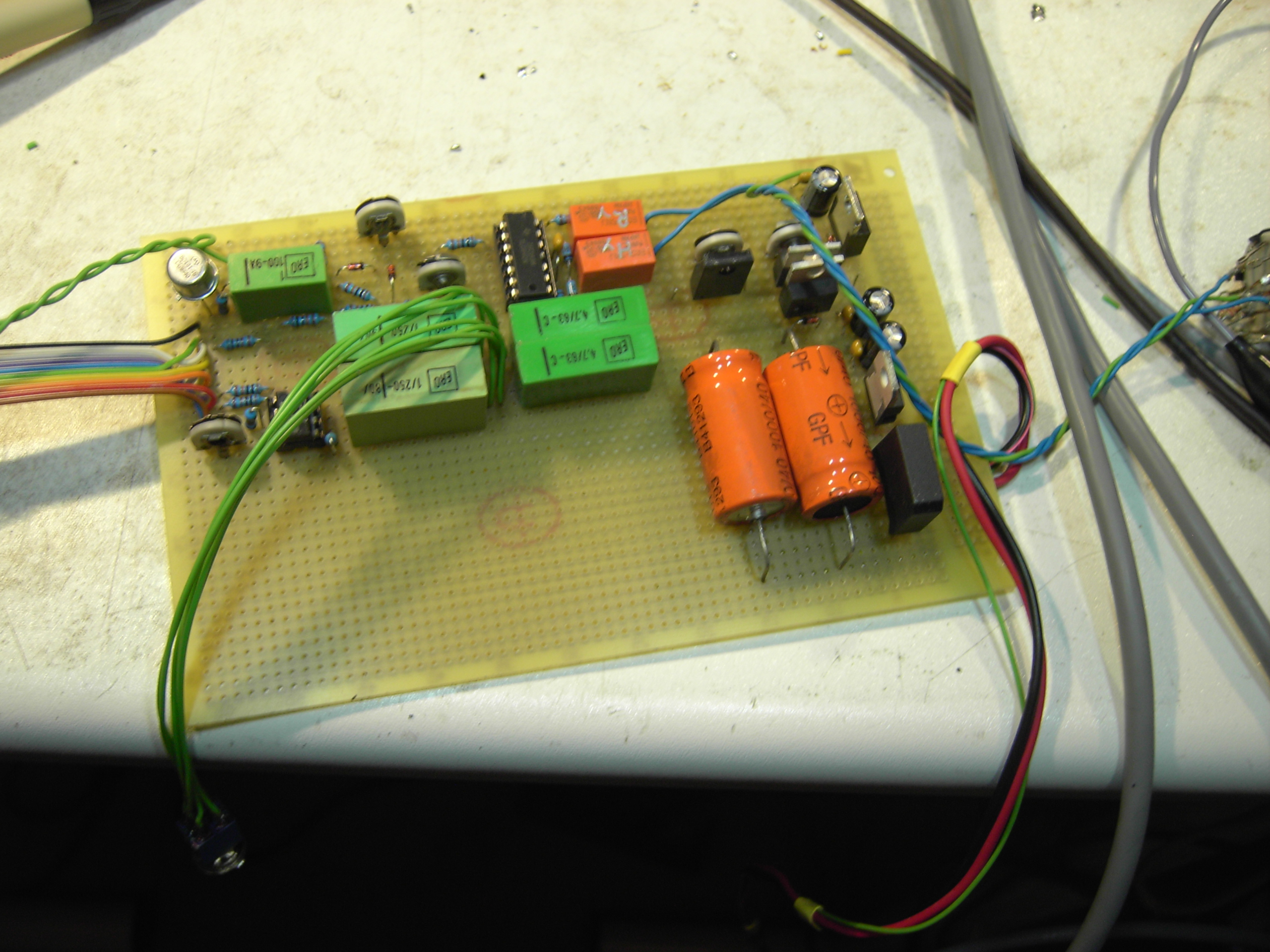
Das Bild links zeigt die Bestückungsseite des Simulators. Rechts findet sich das (deutlich zu komplizierte) Netzteil, das hier noch + 5 V, +/- 15 V sowie +/- 10 V liefert. Daneben befindet sich der zentrale Vierfachoperationsverstärker des Typs TL084 mit den beiden orangen Relais zur Betriebsartensteuerung der Integrierer. |
|
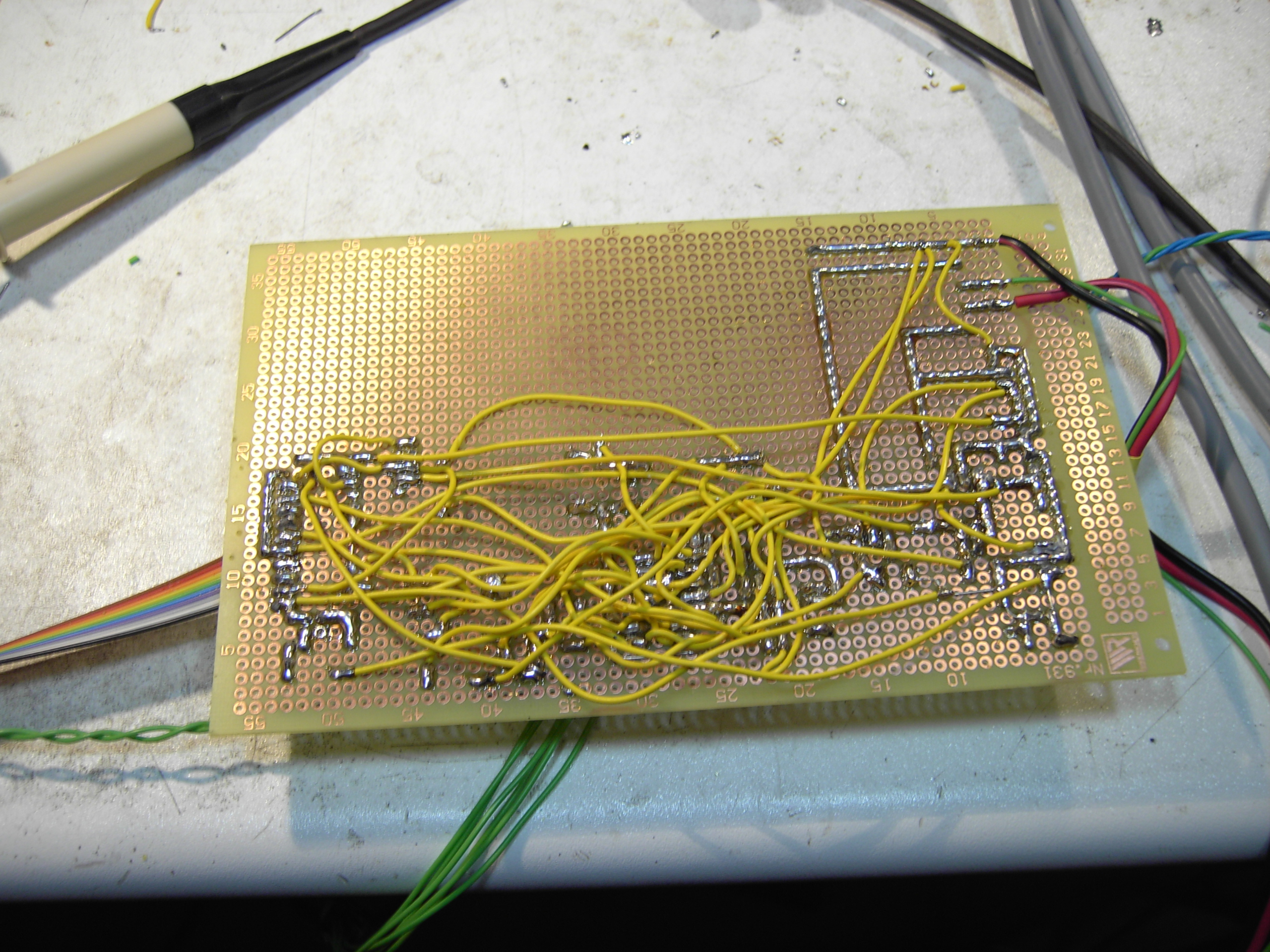
Das Bild rechts zeigt die Lötseite des Simulators, die leider etwas sehr eng geraten ist, was daran liegt, dass ich ursprünglich eine komplexere Simulation mit einem eigenen Ablenkgenerator für die Ballbewegung in x-Richtung plante, was jedoch aus Zeitmangel aufgegeben wurde. |
|
|
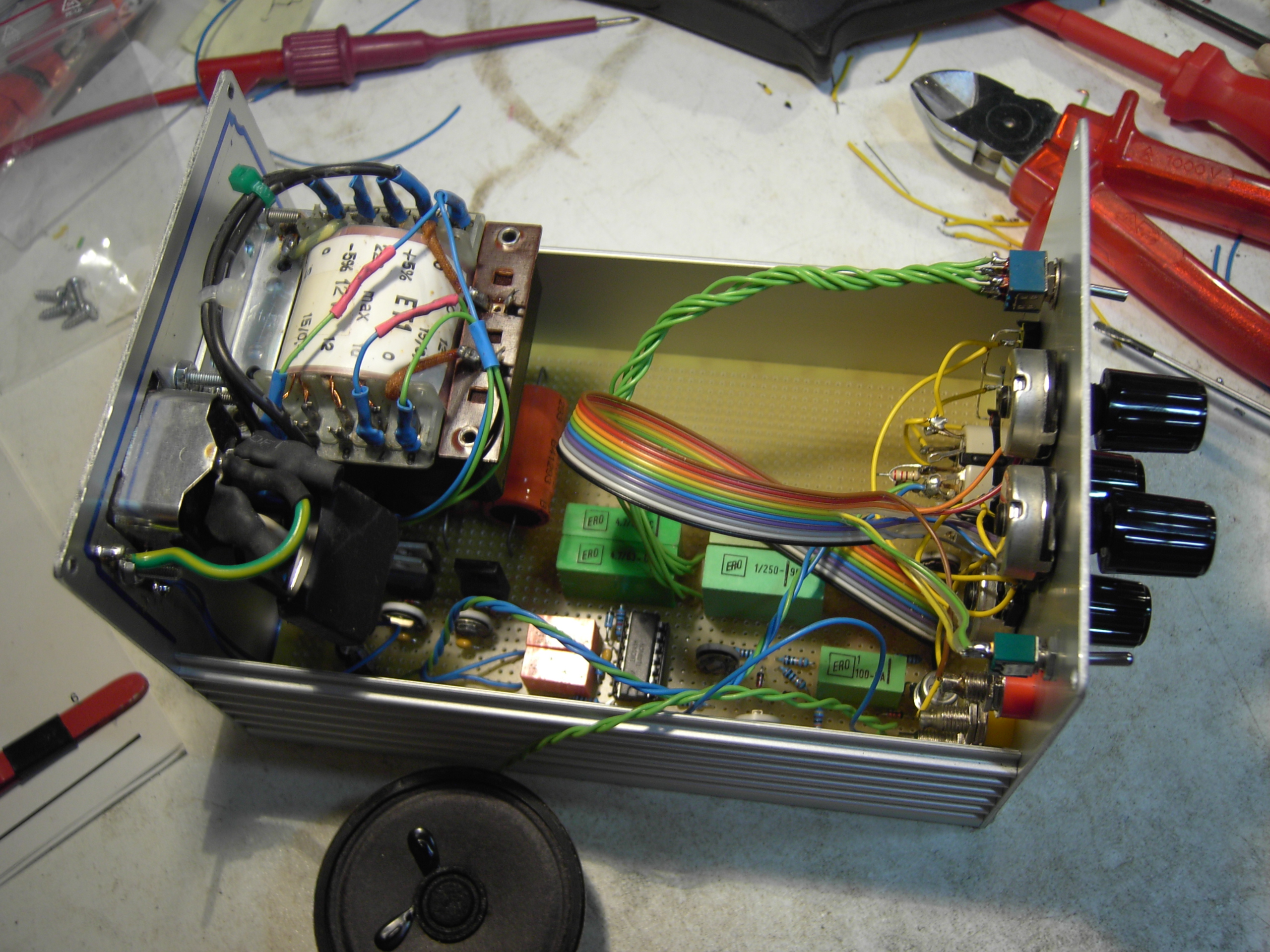
Das Bild links zeigt den Simulator in seinem Gehäuse mit Netztransformator und dem Bedienpanel auf der rechten Seite. Am unteren Bildrand ist der noch nicht montierte Lautsprecher zu erkennen. |
|
Das Gesamtsystem zeigt das Bild rechts. Links befindet sich ein einfaches, preiswertes Voltcraft-Oszilloskop, das ideal für derartige Demonstrationszwecke ist, da es leicht auf Reisen mitgenommen werden kann, während der Ballsimulator rechts davon steht. Die drei Potentiometer auf der Frontseite des Simulators dienen zur Einstellung der Dämpfung, Erdbeschleunigung sowie der Elastizität des Balles. Der grosse Schalter unten rechts dient zur Betriebsartenwahl, die beiden kleinen Kippschalter erlauben es, den Lautsprecher abzustellen und zwischen langsamer und schneller Simulation zu wählen. |

|
|
Hier findet sich ein kleines AVI-Video, das einen Simulationslauf in der Betriebsart schnell zeigt - eine kleinere Version hiervon findet sich auch auf Youtube. |
|
|
26-APR-2009, 10-MAY-2009, ulmann@analogmuseum.org |
|